

INTRODUCTION
1.1 GENERAL BACKGROUND
Road accident is most unwanted thing to happen to a road user, though they happen quite often. The most unfortunate thing is that we don’t learn from our mistakes on road. Most of the road users are quite well aware of the general rules and safety measures while using roads but it is only the laxity on part of road users, which cause accidents and crashes. Most of the fatal accidents occur due to over speeding. It is a natural psyche of humans to excel. If given a chance man is sure to achieve infinity in speed. But when we are sharing the road with other users we will always remain behind some or other vehicle.
Increase in speed multiplies the risk of accident and severity of injury during accident. Faster vehicles are more prone to accident than the slower one and the severity of accident will also be more in case of faster the severity of accident will also be more in case of faster vehicles. Consumption of alcohol to celebrate any occasion is common. But when mixed with driving it turns celebration into a misfortune. Alcohol reduces concentration. It decreases reaction time of a human body. Limbs take more to react to the instructions of brain. It hampers vision due to dizziness. Alcohol dampens fear and incite humans to take risks. All these factors while driving cause accidents and many a times it proves fatal.
Though distraction while driving could be minor but it can cause major accidents. Distractions could be outside or inside the vehicle. The major distraction now a days is talking on mobile phone while driving. Act of talking on phone occupies major portion of brain and the smaller part handles the driving skills. This division of brain hampers reaction time and ability of judgement. This becomes one of the reasons of crashes. One should not attend to telephone calls while driving.

1.3 SCOPE
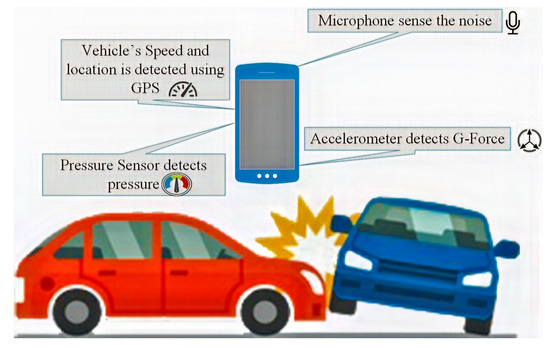
The road accidents take place frequently which causes huge loss of life and property because of the poor emergency facilities. Our project will provide an optimum solution to this draw back. This design is a system which can detect accidents in significantly less time and sends the basic information to various authorities within a few seconds covering geographical coordinates in which a vehicle accident had occurred. This alert message is sent to the rescue team in a short time, which will help in saving the valuable lives.
LITERATURE SURVEY
In this paper, an algorithm is proposed to evaluate the speed of the accident vehicle by videos. With human interaction, control points are refined by corner detector and then used for two-dimension geometric correction. The frame difference method is employed to capture the accident vehicle in images. Once the velocity curve is obtained and smoothed, the motion trajectory and speed of an accident vehicle at collision can be captured as well. Experimental results show that the proposed method is more accurate in speed measurement. It will facilitate the traffic police to deal with traffic collision cases in a real world. Although the dynamic approach has been widely applied now and the velocity of the accident vehicle can be calculated by comprehensive analysis on the vehicle and trace on site, it is still difficult to obtain a reasonable and accurate result through the dynamic approach since some parameters are uncertain and the trace on road surface is difficult to retain, measure accurately or being repeated. Although the dynamic approach has been widely applied now and the velocity of the accident vehicle can be calculated by comprehensive analysis on the vehicle and trace on site, it is still difficult to obtain a reasonable and accurate result through the dynamic approach since some parameters are uncertain and the trace on road surface is difficult to retain, measure accurately or being repeated. The proposed system helps to measure the accelerating speed. Here no measures are taken for the accident [1].
Intelligent visual surveillance for road vehicles is the key to developing autonomous intelligent traffic systems. Traffic incident detection employing computer vision and image processing has attracted much attention. In this paper, a probabilistic model for predicting traffic accidents using three-dimensional (3-D) model-based vehicle tracking is proposed. Sample data including motion trajectories are first obtained by 3-D model-based vehicle tracking. A fuzzy self-organizing neural network algorithm is then applied to learn activity patterns from the sample trajectories. Finally, vehicle activity is predicted by locating and matching each partial trajectory with the learned activity patterns, and the occurrence probability of a traffic accident is determined. TRAFFIC is of great importance in a modern society. The effective management of traffic, especially of road vehicles, has become an urgent problem to be solved. Traffic surveillance using monitoring cameras has already been widely applied in current traffic management. However, current methods depend on human observation of captured video sequences of images. This requires a great deal of human work and does not allow a real-time response to abnormal events. With computer vision and image-processing methods, intelligent traffic surveillance systems. A 3-D model based vehicle tracking is used for efficient tracking. But here only detection of accident will be shown, there is no prevention or alerting system [2].

<!– /* Font Definitions */ @font-face {font-family:”Cambria Math”; panose-1:2 4 5 3 5 4 6 3 2 4; mso-font-charset:0; mso-generic-font-family:roman; mso-font-pitch:variable; mso-font-signature:-536869121 1107305727 33554432 0 415 0;} /* Style Definitions */ p.MsoNormal, li.MsoNormal, div.MsoNormal {mso-style-unhide:no; mso-style-qformat:yes; mso-style-parent:””; margin:0in; margin-bottom:.0001pt; mso-pagination:widow-orphan; font-size:12.0pt; font-family:”Times New Roman”,”serif”; mso-fareast-font-family:”Times New Roman”;} .MsoChpDefault {mso-style-type:export-only; mso-default-props:yes; font-size:10.0pt; mso-ansi-font-size:10.0pt; mso-bidi-font-size:10.0pt;} @page Section1 {size:8.5in 11.0in; margin:1.0in 1.0in 1.0in 1.0in; mso-header-margin:.5in; mso-footer-margin:.5in; mso-paper-source:0;} div.Section1 {page:Section1;} –>
7.1 CONCLUSION
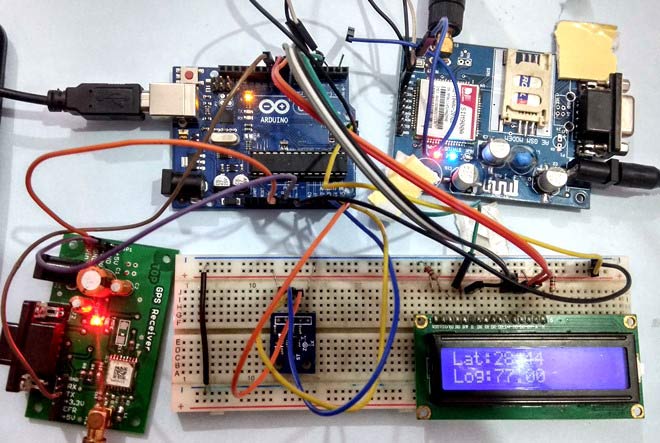
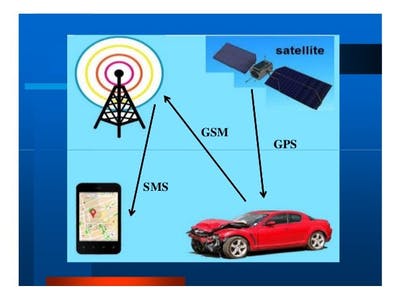
This project presents vehicle accident detection and alert system with SMS to the user defined mobile numbers. The GPS tracking and GSM alert based algorithm is designed and implemented with LPC2148 MCU in embedded system domain. The proposed Vehicle accident detection system can track geographical information automatically and sends an alert SMS regarding accident.
EEPROM is interfaced to store the mobile numbers permanently. This made the project more user-friendly and reliable. The proposed method is verified to be highly beneficial for the automotive industry. The Expected performance is achieved through implementation of the proposed system. The sensor and other required components are distributed throughout the car providing more optimal results to detect accidents. The proposed system can also be used for traffic estimation and system performance estimation to prevent loss of life to its maximum.
The GPS tracking and GSM alert based algorithm is designed and implemented in embedded system domain. This system can be proved to be effectual to control not only ambulance but also authoritative vehicles. Thus if this system is implemented in countries with large population like INDIA can produce better results. This system is more accurate with no loss of time. But there may be a delay caused because of GSM messages since it is a queue based technique, which can be reduced by giving more priority to the messages communicated through the controller.
7.2 FUTURE SCOPE
This system can be interfaced with vehicle airbag system that prevent vehicle occupants from striking the interior objects. This system can be also developed by interconnecting a camera to the controller module that takes the photograph of the accident spot that make tracking easiar
We can dial an emergency call if the vehicle goes out of a certain /pre-decided track.We may add some modules which will also let the system know about the traffic details and then find out which node will take less time to reach from the accident spot. We can add is first aid kit for emergency medical treatment at the scene itself.
We can also add some modules which will measure the injuries level or some additional information like blood group, heart beats, current glucose level which may be send to the hospitals in advance before the victims reaches the hospitals hence improvise the performance of the proposed system.
A wireless webcam can be added in this for capturing the images which will help in providing driver`s assistance. This can also be bettered by locking all the brakes automatically in case of accident.
Mostly in accidents, it becomes serious as the drivers lose control and fail to stop the vehicle. In such cases, the vibration sensor will be triggered because of the vibrations received and also processed by the processor. The processor has to be linked to the devices which can lock the brakes when triggered. With this improvement, we can stop the vehicle and can weaken the impact of the accident. This system can also be utilized in fleet management, food services, traffic violation cases, rental vehicle services etc.